Back to BAS Basics
Actuation
Actuation
Paul Ehrlich, Ira
Goldschmidt
& Angela Lewis
Building
Intelligence Group
As
published

April Issue - Column
April Issue - Column
|
April 2012 |
[an error occurred while processing this directive] |
|
Back to BAS Basics
Actuation |
Paul Ehrlich, Ira
Goldschmidt
& Angela Lewis As
published
April Issue - Column |
| Articles |
| Interviews |
| Releases |
| New Products |
| Reviews |
| [an error occurred while processing this directive] |
| Editorial |
| Events |
| Sponsors |
| Site Search |
| Newsletters |
| [an error occurred while processing this directive] |
| Archives |
| Past Issues |
| Home |
| Editors |
| eDucation |
| [an error occurred while processing this directive] |
| Training |
| Links |
| Software |
| Subscribe |
| [an error occurred while processing this directive] |
This month we are going to go “back to basics” and discuss some of the
fundamental concepts involved with the design, maintenance and upgrades
for building automation systems.
In any control loop we have a number of fundamental elements. The key elements are identified in figure 1:
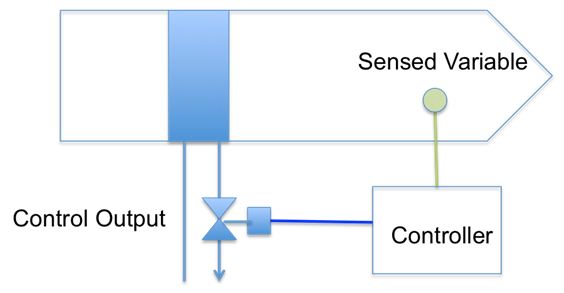
Let's focus on the details of how the control output is actuated.
The controller is going to produce some form of analog signal that
needs to be converted into a physical action, which will in turn
position the control valve.
Signaling: The analog output from the controller is typically a 0
– 10 Volt DC or 4 – 20 mA. Other alternatives include digitally
communicated values, or the use of set of binary outputs (one to drive
open and the other closed).
[an error occurred while processing this directive]
Positioning and Feedback: The challenge with controlling a
mechanical device is that the positioning of the valve may not react
smoothly and linearly with the control signal. Much of this is
due to friction, flow and hysteresis. As a result changes in
control output will not always result in a linear change to the output.
The impacts of hysteresis will always exist but can be minimized by
providing feedback on position within the controlled device.
Without position feedback control loops will tend to be more unstable.
Actuation: The actuator needs position the control output (in
this case a valve) in responses to the output signal from the
controller. There are several challenges with actuating a
mechanical device.
The most common options for actuation include:
A good control design and deployment will have accurate and stable
control. While it is possible to do this with pneumatic
actuation, it is more complicated and prone to error. This is why
we prefer to see systems deployed with electronic actuation.
[an error occurred while processing this directive]
[Click Banner To Learn More]
[Home Page] [The Automator] [About] [Subscribe ] [Contact Us]