|
March 2018
Column
AutomatedBuildings.com
|
[an error occurred while processing this directive]
(Click
Message to Learn More)
|
Good building
mechanical design requires a firm grasp of the mechanical engineering
fundamentals (e.g., thermodynamics, psychrometrics, the fan laws,
etc.). The same can be said about the BAS design needed to
control these mechanical systems. However, engineers are not
normally taught control theory and its application to commercial
buildings. Therefore BAS designs often lack the same engineering
foundation as that for the associated mechanical systems. This
month I will revisit an important aspect control fundamentals.
Control
Loops are the foundation of how a BAS performs temperature
control. There are often thousands of control loops in even a
moderately sized BAS, and there are usually three or more control loops
in a single VAV box controller. There are two types of control
loops: open and closed. Open loop control bases its action on
input, but that action does not have an effect on the input.
Examples include time clock control, reset schedules based on outside
air temperature, etc. Open loops are important to temperature control,
but they should never be used when closed loop is the right approach.
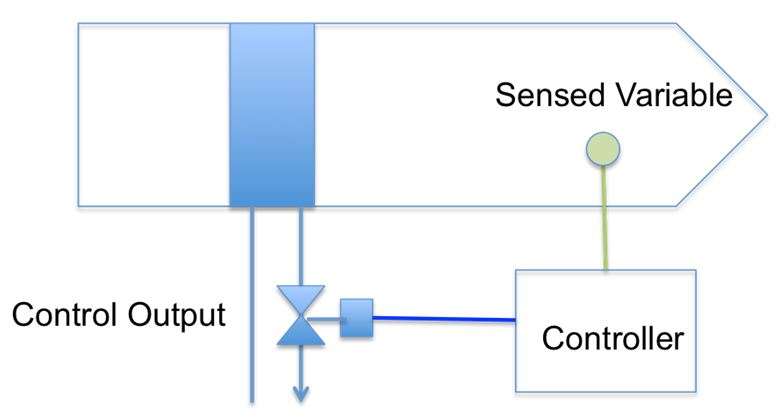
Closed
Loops are the key element of temperature control. They
differ from open loop control by the fact that the input (i.e., the
“Sensed Variable” aka “Controlled Variable” – see Figure 1) provides
feedback to the action of the loop. Sensors (i.e., temperature,
pressure, humidity…) provide the “Sensed Variable” value and
feedback. There are two types of closed loops depending on the
device/equipment controlled: on/off and modulated (where “modulated”
means that the device’s position or equipment’s capacity can be set to
any one of a large number of positions between open/closed, low/high
speed, etc.).
- On/off
Control is used when the controlled device/equipment cannot be
modulated (e.g., a single speed fan, solenoid valve, DX compressor,
simple boilers/furnaces, etc.). The control algorithm used is
essentially a mathematical version of an on/off thermostat.
On/off temperature control does not provide very accurate control but
it may be the only choice given the type or class of controlled
device/equipment. Therefore it still is an important ingredient
to temperature control.
- Modulated
Control is generally the most-used type of temperature control in
a commercial building. A “PID” algorithm is typically used by a
BAS to implement closed-loop control. In short, a PID
algorithm (which is part of the “Controller” programming) compares the
“Sensed Variable” to the setpoint, the value to which the “Sensed
Variable” is expected to be maintained. Based on the error
between the “Sensed Variable” and setpoint the PID algorithm
continuously determines a “Control Output” value (typically 0-100%
which is then converted by the BAS hardware to 0-10vDC, 4-20maDC, etc.)
with the goal of maintaining the “Sensed Variable” at the setpoint.
FIGURE 1. The
elements of a control loop
[an error occurred while processing this directive]What’s the
Challenge?
PID control loops
require tuning of gain parameters to ensure that they can provide a
response that reaches setpoint in a reasonable time and remains stable
thereafter. These gain parameters determine how much effect a
change in the error between the “Sensed Variable” and setpoint has on a
change in the “Control Output” value. If the gains are too
sensitive, then the loop will continuously cycle (aka “hunt”) above and
below the setpoint, and if not sensitive enough then the loop will be
slow to respond and may never reach setpoint. There are no
universal “gains” that can be used for all or even a subset of HVAC
applications. What’s more, the correct gain parameters can change
over time as the controlled device/equipment performance changes over
time. Therefore getting and keeping PID loops properly
functioning is one of the more challenging (and perhaps the most
overlooked) aspects of operating/maintaining a BAS.
footer
[an error occurred while processing this directive]
[Click Banner To Learn More]
[Home Page] [The
Automator] [About] [Subscribe
] [Contact
Us]