|
February 2017
AutomatedBuildings.com
|
[an error occurred while processing this directive]
(Click
Message to Learn More)
|
Main Benefits of Model Predictive
Control
MPC is not a single
strategy, but a class of control methods with the model of the process
explicitly expressed in order to obtain a control signal by minimizing
an objective function subject to some constraints.
|

Jiří Cigler
CEO
Feramat
Cybernetics

Jan Široký
Research Team Leader
Energocentrum
Plus
|
Model
predictive control (MPC) algorithms applied for a control of building
technologies have gained a lot of attention in last years. Various
research studies, as well as real installations, proved its potential
for energy efficient operation leading to energy savings in the range
up to 30%. The highest potential of this method is considered to be in
i) systems with energy storages/accumulation (e.g. thermal storage
tanks, TABS systems, PCM), ii) systems with multiple sources of energy
and complex interconnections (typically containing renewables -
microgrids), iii) systems in environment with dynamic energy prices or
with strict power consumption limits, iv) demand response applications,
etc.
This article will present a case study of the MPC
applied for a room temperature control equipped with TABS emission
systems and with power consumption limit that has to be fulfilled.
MPC Principle
MPC is a method for a constrained control which
originated in the late seventies and early eighties in the process
industries (e.g. oil refineries, chemical plants). MPC is not a single
strategy, but a class of control methods with the model of the process
explicitly expressed in order to obtain a control signal by minimizing
an objective function subject to some constraints. In building control,
one would aim at optimizing the energy use or cost subject to comfort
constraints.
During each sampling interval, a finite horizon optimal
control problem is formulated and solved over a finite future window
called a prediction horizon. The result is a trajectory of inputs and
states into the future satisfying the dynamics and constraints of the
building while optimizing some given criteria. In terms of the building
control, this means that at the current point in time, heating/cooling,
etc. plan is formulated for the next several hours to days, based on
predictions of the upcoming weather conditions. Predictions of
any other disturbances (e.g., internal gains), time-dependencies of the
control costs (e.g., dynamic electricity prices), or of the constraints
(e.g., thermal comfort range) can be readily included in the
optimization.
The first step of the control plan is applied to the
building, setting all the heating, cooling and ventilation elements,
then the process moves one step forward, and the procedure is repeated
at the next time instant. This receding horizon approach is what
introduces feedback into the system, since the new optimal control
problem solved at the beginning of the next time interval will be a
function of the new state at that point in time and hence of any
disturbances that have acted on the building.
The MPC is a perfect mean for regulating energy
consumption peaks because the controller foresees the predicted energy
consumption and knows the power limits and thus it optimizes the
consumption profile in order to satisfy the consumption limits.
Therefore, the end customer saves not only on the costs for the
commodity but also on the costs for reserved capacity.
In the control hierarchy of the building automation
system, the MPC is typically on the top representing an energy
optimization layer. The MPC sends demands (e.g. setpoints on
temperatures in zones or accumulations) to a common BMS or to a
building control system, which consists a Programmable Logic Controller
(PLC).
Case Study
An application of the MPC to a university building
(Figure 1) in Prague will be described. The Czech Technical University
(CTU) building is composed of four five-floor blocks, three eight-floor
blocks and four-level intermediary parts among the respective blocks.
All the blocks have the same construction and way of use. This provides
us with a unique opportunity to compare different control techniques
under the same weather conditions since we can use different
controllers in different blocks at the same time.

Figure 1: The CTU
building
The CTU building uses a Crittall type ceiling radiant
heating and cooling system (nowadays, the system would be called TABS –
thermally activated building system). In this system, the heating (or
cooling) beams are embedded into the concrete ceiling that enables the
utilization of the thermal capacity of the building.
As mentioned, the MPC is also suitable for power peak
reduction. This will be illustrated on the CTU building data. We will
focus on a particular heat exchanger. There are three heating zones
connected to one heat exchanger (HEX), and there also exists a power
consumption limit for the HEX (i.e. a quarter-hour power maximum). A
traditional control system is not able to optimally solve this problem;
it can only contain some heuristic rules. The predictive control is
able to have the consumption under the limit and fulfill the room
temperature setpoints (i.e. thermal comfort).
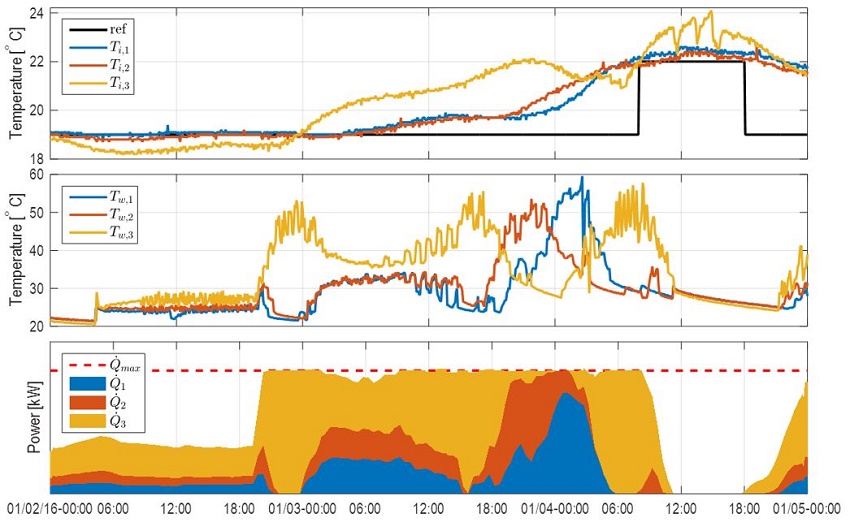
The figure below (Figure 2) shows a situation when a
change of the setpoint (denoted as ref)
was coming after the Christmas setback when the room temperatures Ti,j in the building
were kept at 19°C. The predictive controller plans to start the heat
supply Qj two days before
the change of the setpoint, and as can be seen from the graph, the
consumption limit was always under the limit Qmax. The traditional control
system would not meet the temperature setpoint or would break the
consumption limit.
Notice also the progress of the supply water temperature shown in the
middle figure, which shows very unusual behavior, but for this
situation, these profiles were the optimal ones.
It is also important to set the power limit and the
prediction horizon of MPC properly. To do so, we used the model that
the MPC uses for the optimization, and we evaluated this scenario: a
transition from the room temperature 19°C to 22°C, the outside
temperature -10 °C, the heating for maximum power over the time of the
prediction horizon. Based on this simulation, we obtained the most
suitable prediction horizon equal to 36 hours.
Figure 2: Example data from one HEX in the CTU building
On the studied building, the MPC is in operation since
2008 and
controls 18 heating circuits with the TABS emission system.
Implementation of the MPC was one of the last steps in modernization,
which started as early as 1996 by successive façade insulation
improvements, improvements in the HVAC system technologies with higher
efficiencies that went hand in hand with the implementation of proper
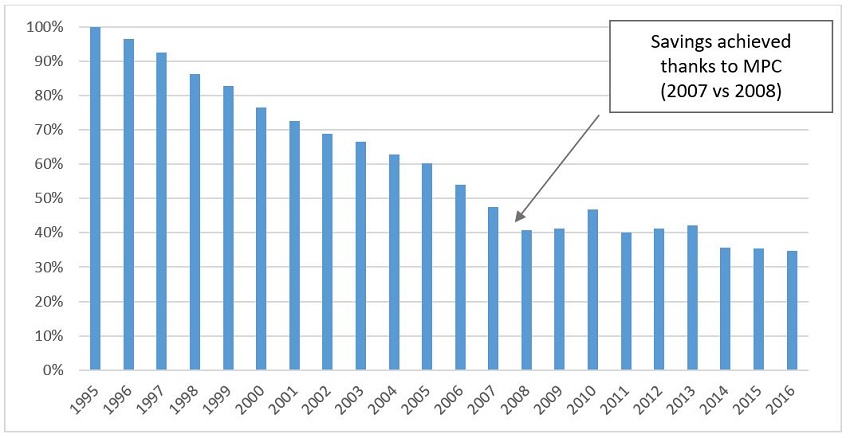
basic control strategies. The effort is shown in Figure 3 below, where
the consumption of the whole building is depicted over the years.
Figure 3: History of
the energy
consumption of the CTU building. There
was a major modernization from 1995 to 2007 (mainly vapor heating
system removal and building façade insulation). Energy savings in 2008
were achieved after application of MPC.
Conclusion
[an error occurred while processing this directive]In this article, we have shown how the MPC can be
applied for the regulation of slow reacting heating systems where there
exists a quarter hour power limit. The traditional control strategies
solve this problem hardly because they control either supply water
temperatures or mass flows in the circuits but not the heating power.
Feramat Cybernetics and Energocentrum Plus have
integrated the MPC control system into the product portfolio as the MPC
maturity has already reached the production level. The CTU building
heating system is operated by MPC from 2008. Significant energy savings
were achieved thanks to MPC during this period (USD 300 000).
Parts of this article are based on the journal paper http://www.sciencedirect.com/science/article/pii/S0306261911001668
About the Authors
Jiří Cigler is CEO of company Feramat Cybernetics (www.feramat.com).
He gained Ph.D. at the Department of Control Engineering of Czech
Technical University in Prague with topic model predictive control
applied for HVAC systems. During the Ph.D studies, he was also part of
OptiControl team at ETH Zurich. Now, Jiří is fully concentrating on the
application of the advanced control algorithms in practice through the
Feramat company.
Jan Široký is leader of research team of Energocentrum
Plus company. Jan has gained his Ph.D. at the University of West
Bohemia, Department of Cybernetics. During his studies he
undertook an internship at ETH Zurich. The main activity of
Energocentrum is operation and servicing of energy equipment,
technological equipment of buildings and measurement and regulation. Energocentrum has its own research and development
department. This team develops software products for measurement and
control (e.g. cloud based SCADA system Mervis - https://mervis.info ).
Research team is focused on advanced control and monitoring algorithms
for buildings.
footer
[an error occurred while processing this directive]
[Click Banner To Learn More]
[Home Page] [The
Automator] [About] [Subscribe
] [Contact
Us]