|
September 2018
AutomatedBuildings.com
|
[an error occurred while processing this directive]
(Click
Message to Learn More)
|
“No thanks” right?
Don’t worry it’s not spying on you or judging you. Nor will it be
sending that video to anyone else for that purpose. The images
it’s capturing are only being used locally by the controller to improve
your indoor environment, provide security, and conserve energy. The
imagery that’s captured is processed directly at the device. Only
necessary information is extracted from the video stream and then all
unused data is discarded right there. It goes no further than the
device.
The only pieces of information your zone controller wants to know are:
- The approximate dimensions of the room.
- The number of human occupants.
- Their approximate locations.
- Their general level of physical activity.
- The lighting conditions in the room.
These
bits of information can be used for zone control applications much
better than current devices. Traditional control tasks such as
scheduling and occupancy can be accurately determined rather than
guessed. Say, for example, a school classroom has a full class
scheduled in the BMS system, but no one actually shows up that day.
Should the ventilation go to occupied airflow? Should the zone
temperature go to occupied setpoint? Doing so with nobody there is a
tremendous waste of money and electricity. A motion sensor might help
solve the problem to some degree. However traditional occupancy or
vacancy sensors rely on very good placement and sometimes constant
detected motion to stay active. Also, what if only a single person
walks in and then walks right out? Should the zone go active for that
whole period? What if everyone is in there, but they are stationary and
not moving around enough? Will the motion sensor go inactive? These are
the kinds of control issues contractors deal with every day.
Another
related issue is access control. Accessing a room can be an
attention-hijacking experience. In a simple system, a card or key fob
reader can be positioned at the entrances and exits to a
building. A single access control point is relatively easy to
deal with, but as additional layers of access are required within the
building more and more card readers need to be added. This is a less
than perfect system.
Zone
lighting control in a space can also be difficult. Especially if there
are multiple light sources such as windows or skylights. Often a zone
lighting system is dependent on a single discrete light level sensor.
Placement and orientation of this sensor is critical and sometimes
difficult to get right the first time. We once installed a new demo
lighting system that we were soon to be selling in our brand-new
office. The system worked well during the initial start-up and
commissioning, but after a few months of use, the dimming control began
to behave erratically in certain zones. The problem turned out to be
certain light level sensors were positioned in such a way that light
from nearby windows hit them directly as the seasons changed. This
caused the feedback loop for those individual sensors to respond
incorrectly either by dimming the lights completely off or fluctuating
on and off. The problem here was that the value from a single sensor in
one location was representing the entire room.
In
all of the above situations, a video image of the room would do much
better and could clear up the confusion and ambiguity that are
consequences of using individual discrete sensors. A single inexpensive
miniature camera can replace the motion sensor, light level sensor, and
access controller. There would be no need to install these separate
sensors and clutter up walls and ceiling space, as well as require long
wire runs through the walls. Instead of being able to receive only
single localized detected values, you can instead view the space in a
complete context. A video image of space provides large amounts of
contextual data. If only there was a person available to continuously
view the video and make the control adjustments all day. Instead of a
live person, we can now perform tasks such as these with edge-bots!
Traditional
cameras used for security purposes do not usually locally store image
streams for particularly long periods of time. Video data is typically
sent across networks to a centralized recording device. If any kind of
artificial intelligence processing were to occur, it would have to be
at that central device. This architecture can limit the total number of
possible camera equipped zone controllers, as streaming video is the
most bandwidth intensive type of network communication in a building
automation system. Especially if the images are to be processed for
control information and then sent back to the controller in real-time.
For many large buildings, it would be impractical to have image
streaming for every single zone to a central location. It would make
much better sense to process the imagery right there at the edge device.
This
is a perfect use case for the implementation of Machine Vision
and Deep Learning in edge devices. Machines are
programmed to recognize objects much in the same way we recognize
objects; through the use of Neural Networks. Recent advancements in
image recognition have allowed not only for the correct recognition of
single objects alone by themselves, but also the detection of multiple
instances of the same kinds objects in images with other types mixed
in. The process by which useful image recognition software is created
for use in machine vision is called Deep Learning. This process
consists of two stages; training and inference.
An artificial software neural network model is created and then trained
using standardized data sets. In this case, we would be using an
annotated dataset containing images of people such as the COCO dataset.
These software models are not trained at the edge device but rather on
a server with far greater resources, as this is the most
computationally demanding of the two stages. Once trained and
optimized, the software neural network model is then ready to be
deployed to recognize images on its own through inference at the edge
device. Dividing these two tasks in this way eliminates the need to
stream video data for processing across a network to a central
location. Since video images are not sent any further than the
edge device, this also may help alleviate some privacy concerns.
[an error occurred while processing this directive]To
actually enable edge processing, we need suitable edge controller
hardware components. The problem in the past was that a device with the
processing power required to construct such hardware at a reasonable
cost did not exist. Most legacy HVAC zone controllers are based on microcontrollers
which are simple, low-cost, single-task devices. These processors
usually only have enough resources to run simple small-footprint DDC
code and not much else. The situation has now changed in recent years
with the wide availability of low-cost embedded microprocessors.
These devices sometimes referred to as System on Chip or
(SOCs) are much more like miniature desktop PCs that use full operating
systems such as Linux, and can run multiple programs concurrently. This
multitasking capability allows the device to easily run DDC programs as
well as other applications such as Haystack servers or AI processing
simultaneously. The prices of these chips are beginning to drop so
drastically that the other day a complete embedded ARM-Linux PC was announced that would only cost a
few dollars!
These
miniature computers can easily run traditional DDC code as well as
other applications, but the processing of voice and image data through
neural networks could use the assistance of specialized processors.
This summer Google announced the upcoming release of an Edge
Development Kit to accelerate the development of an AI edge-bot
style device. The offering is possibly an answer to release of
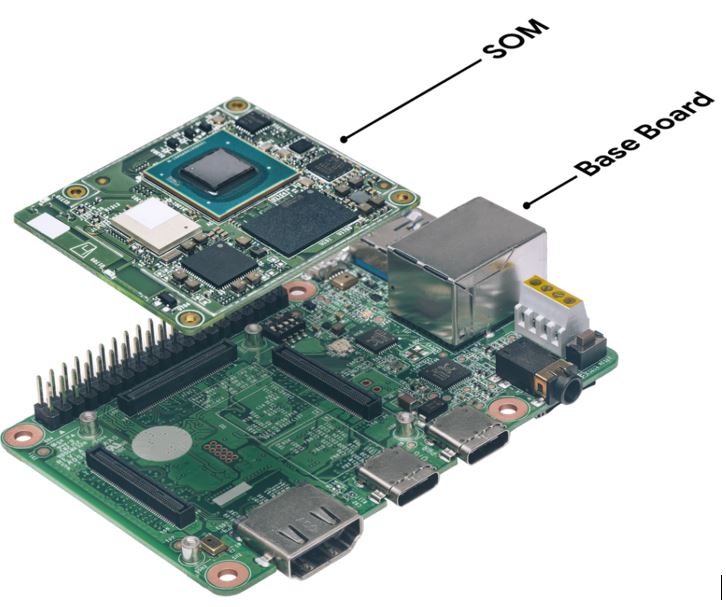
competitor NVIDIA’s Jetson Development Board. The Google
processor board contains a special integrated circuit called the Tensor Processing Unit (TPU). This chip is a
specialized co-processor that is devoted to computational tasks related
to artificial intelligence and machine learning. The kit resembles a
Raspberry Pi in size and layout with the main difference being that the
portion containing the main processor, flash memory, RAM, and TPU are
located on a single detachable module. This System on Module or (SOM)
is ready to be plugged into your own product’s baseboard when you are
ready to transition from development into a production device.
Tensorflow
is an open source software project that provides code libraries that
are well suited toward deep learning neural network development.
Programmers are familiar with traditional basic data types such as a
“char” “int” “string” or “float.” A Tensor is just another
data type.
The format of a tensor is that of a multidimensional array.
This
data-type format is convenient for representing and processing complex
vector-based information which flows through various operations in
neural networks. Traditional processor hardware architectures are not
well suited for performing operations on vectors and matrices. To more
easily manipulate tensors the hardware architecture should be able to
perform matrix-multiplication which repeatedly occurs as
the tensor
passes through layers of the network. The Google TPU chip provides this
hardware acceleration on the board which helps offload neural network
processing tasks. Having a co-processor allows the main modules
processor(s) to easily manage other non-vector based scalar
applications that are typically seen in building automation software.
All
of these board sub-components combine together to create the
foundation for the ultimate Open-Software, Open-Hardware, Edge
controller. This can be done, and it can be done at a reasonable cost.
Claims like this may seem like science fiction. If it were so easy to
build one of these devices, why has no company already offered such a
product? These concepts may sound far-fetched, but in fact, all of the
necessary components that would be needed for even a hobbyist to
implement an edge-bot zone controller are here and readily available
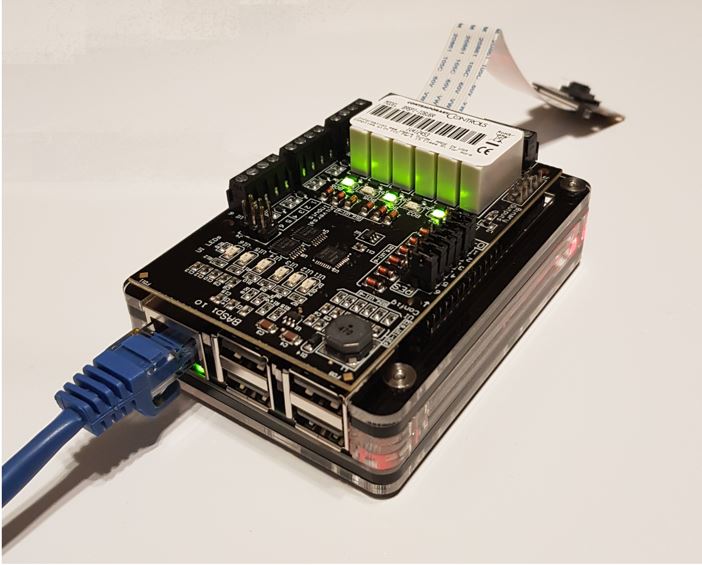
right now. For example, a Raspberry Pi can function as your main
processor board and can be had for less than 30 USD. Interestingly,
developers for Tensorflow recently announced full Raspberry Pi
support. A controller needs some I/O, for this you can use
Contemporary Controls BASPi add-on- board which will also at the same
time give you open-source Sedona DDC control. The Pi NoIR camera can be
your edge-bot’s eyes also for less than 30 dollars. You can learn how
to implement machine vision using OpenCV which is a free open source
software library to get you started on your machine-vision development
project. Indeed, the above pieces would give you all of the hardware
and most of the software to make an edge-bot. So if all of these bits
and pieces are available right now why has an edge-bot not yet been
created?
Editor's notes: This Memoori report adds strength to Calvin's words The Competitive Landscape for AI Video Analytics is Intense
Published: August 27th, 2018 We have identified some 125
companies that are active in supplying appropriate semiconductor chips
and AI video analytic software products. New companies are being added
to this list almost weekly and although we cannot claim that it
includes all suppliers it is probably today the most comprehensive
listing on this subject.
About the Author
Calvin
Slater is a U.S. Navy Veteran and Graduate of UCLA with a BS in
Mechanical Engineering. He has spent eight years in the Building
Automation Controls Industry, and is highly interested in Embedded
Hardware as well as Open-Source building automation software frameworks.
footer
[an error occurred while processing this directive]
[Click Banner To Learn More]
[Home Page] [The
Automator] [About] [Subscribe
] [Contact
Us]
 Calvin Slater
Calvin Slater