|
March 2019
AutomatedBuildings.com
|
[an error occurred while processing this directive]
(Click
Message to Learn More)
|
The Software
The
most important part of an Edge Controller is the software. It’s far
more important to have high quality, reliable, maintainable, and
extensible software than anything else. If given a choice between great
software and only decent hardware, the emphasis should definitely be on
the former.
Heterogenous
System Architecture SoCs is moving
forward at a rapid
pace. Consider the recent announcement by silicon giant ST, who is now
jumping into the apps processor market with the STM32MP1. This new
hybrid Cortex-A7 & M4F chip offers the relatively high-throughput
multitasking capability from its dual A7 cores, combined with the more
deterministic 3-stage pipeline of an M4 microcontroller core, for
performing critical real-time tasks. This device is very similar to
NXP’s offering the i.MX7D which made its debut a year or two ago.
A
decent edge controller only requires the bare minimum processor which
has hardware support for multithreading/multitasking and memory
virtualization. As long as we have controller hardware based on
such a
device, we have the platform to build a great system. Such a controller
can possibly serve for decades without needing replacement. As
mentioned previously, edge controllers use full operating systems. This
gives our building automation applications space to breathe, as well as
support via underlying software libraries to simplify and accelerate
new development.
All
of the new commercial controllers have operating systems of some kind.
Some commonly encountered ones are Linux, Android, QNX, or even
Windows. In many cases, these OSes are special compact embedded
versions of their desktop counterparts. While others, such as those
based the Linux Kernel, consist of the exact same code found on a
full-blown PC. That is to say; there is no such thing as Embedded
Linux, only Linux on an embedded device. This particular feature of
Linux offers great advantages when it comes to applications
development. The software can be developed conveniently on a desktop PC
running a Linux distribution such as Ubuntu. An x86 machine running
Linux can easily develop and build software for an embedded ARM target
device using cross-compilation. For example, the native Unix
code
supplied with Sandstar and/or Sedona
can be built and run on a Linux
desktop, cross-compiled and run on the embedded target, or natively
built on the target itself! This is because the native C/C++ code in
these frameworks use the same standard libraries and system calls.
There are only really two major differences between an embedded
operating system and a desktop system:
1)
Embedded operating systems are usually headless. This means
that they
do not have support for a screen, keyboard, or mouse. Because of this,
they don’t need a desktop environment either. This helps to save a
whole lot of space. If you want one, however, there are lightweight
desktops such as LXQT.
2)
Embedded operating systems have the necessary driver framework to
interact with external sensors and I/O in real-time. Just think of it
as a PC with relays, AOs, and AIs. Here is a fantastic write-up
explaining how a user program would interact with I/O.
For
the Edge Controller to be a successful replacement for legacy devices,
we must avoid the pitfalls of using full operating systems. Products
based on apps processors are significantly more complex than a
microcontroller, which runs a single thread and executes code in place.
One of the major issues with apps-based devices is boot time. With
microcontrollers, even those using a lightweight RTOS, the main program
starts running almost immediately when power is applied or restored.
Contrast this to some production edge controllers which can take
several minutes to start executing DDC code. This situation is
completely unacceptable for a field device performing important tasks
such as running a central plant.
A
lot of the delay with DDC start time in these devices has to do with
the control programs running within a virtualized environment such as
Java. Another problem with virtual environments is that the DDC
applications lose the possibility of running in real-time. Remember
that “runs fast” is not the same as “real-time.” Some manufacturers
have already recently begun to address this issue by moving the
time-critical portions of their control engines out of Java.
Virtualization cannot be completely blamed, however. The operating
system itself needs a bit of time to initialize and start running. A
lot of time can be saved by not loading software which is not needed.
Linux builds can be stripped down so they will boot to console very
quickly. Take a look at this Linux build which boots in only one
second.
The
device must incorporate hardware security at boot-time and maintain a
chain-of-trust spanning into user space. This usually involves the very
first code run to be digitally signed and checked by the processor. Now
that our applications have more space and resources to do stuff, so
does malware. Apps and services will need to communicate to remote
stations using secure and open networking protocols, which are mostly
IP based such as HTTPS, and have the ability to directly connect to a
building management database server located on site, in the fog, or in
the cloud without the need for specialized intermediary network routers
or gateways.
As
long as all these potential pitfalls are properly addressed and
avoided, the advantages of an OS equipped edge controller outweigh its
drawbacks. Devices with operating systems are easier to maintain than
ones with only firmware. One ongoing problem that the edge controller
can eliminate is hardware obsolescence due to unsupported firmware.
Often the controls are the first thing replaced in a new building due
to the original vendor’s inability to support them. This shouldn't be
the case with controllers that are only a few years old. We should be
able to maintain these devices for decades if possible. The underlying
system can be updated and maintained by a qualified system
administrator without significantly affecting the functionality of
installed applications and services running on top.
The
question of who should maintain the underlying OS is still up in the
air. In one model we have the device manufacturer or a third party
maintaining the operating system. This was the proposition for the
now-defunct Android Things platform. Google was to provide
Android
support with system updates for a set period of time and would push
these updates to the devices over the air while installing in the
field. Possibly a more viable solution would be for owners to maintain
their own systems. The facility’s OT administrators would be
responsible for maintaining and updating their own platforms. This
would not require so much specialized HVAC and lighting system
knowledge, as these specialists would only be applying changes to the
underlying operating system. They would easily be able to accomplish
this as it is an environment they are familiar with. There are many
community supported Linux distros out there that would be well suited
for such use, such as Debian.
Once
we have a platform with a general purpose operating system rather than
proprietary firmware images, we are free to install and uninstall user
space building automation software as needed and can continue using the
device for many years. An owner would only have to replace and update
the software, rather than completely remove and replace the entire
controller. Installed applications can be paid, or free such as
Sandstar.
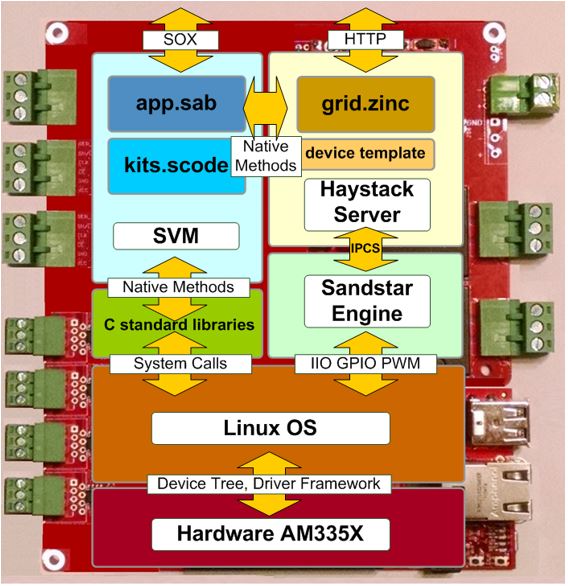
Project
Sandstar provides a good example of what a complete edge controller
system would look like. At the foundation, we have a hardware board
based on the AM335x processor. The entire hardware support for booting
the Linux Kernel on this particular device has been available in
open-source for about ten years now. The demo available on the Sandstar
repository uses Debian as an operating system. However, this demo will
run on any ARMv7-A target, that uses any Linux distro without having to
be re-compiled.
At the very lowest level, we have the Sandstar engine which interacts
with the controller’s I/O and makes updates to a Haystack grid.
Controller points are abstracted to other processes in the form of
channels. Sandstar uses the device driver framework that is already
built into the Kernel. For example, if the engine wishes to read an
Analog Input, it would do so by reading the appropriate ADC input
voltage via the Kernel’s IIO Subsystem. The engine will be able to
identify the available channels and point types by reading the
controller’s device template. The template, which is a .csv file, would
be present in every type of controller and abstracts available I/O
points in hardware. Similarly, the grid is a two-dimensional matrix of
tagged entities that is used to model the controllers physical I/O
points in software. This is why it’s possible to have portable Sedona
apps with Sandstar. On most other Sedona devices, the I/O kits use
native code specifically tailored and created for that device only,
which is why apps are not portable to other devices. Sandstar’s model
does not dictate what physical inputs or outputs should exist on any
platform. Instead, common types of controller points are given in a
generic kit only and abstracted as channels. For example, you can
create an instance of an Analog Input in your Sedona app using the AI
component in the Sandstar kit if it exists. If the point exists on the
controller, then the channel will exist.
[an error occurred while processing this directive]The
Haystack grid serves a second purpose other than providing scalar
control values to the Sedona application. The built-in Haystack server
supplies meta-data directly from the device. In many cases we see
Haystack data being presented not by the actual equipment controller,
but by a proxy device. There is no longer a good reason to do this. The
edge controller, with its increased capability, offers the ability to
present data about the equipment it’s attached to and controlling
directly. This offers two distinct advantages. For one, there is no
need to commission two separate devices relating to the same piece of
equipment. The second much more powerful aspect is the ability to use
tagging not just for information and analytics, but to actually control
the equipment. Consider the use case where a collection of VAV boxes
are served by a particular Air handler, which in turn is being served
by a Chiller. In many proprietary systems, some type of external data
structure must be generated to describe how individual pieces of
equipment should request resources such as “cooling” from one another.
Tags could be used for this purpose. Tags attached to these pieces of
equipment can be used to automatically describe their purposes as well
as their relationship to each other. Currently, existing tags have
individual definitions that are consumable by software. But as of yet,
there is no formal definition of how these standardized tags are
related to each other. Not yet….
Take
a look at working group 551 on the Project Haystack site. There
is an effort underway there to formalize the relationship between
existing tags that can be presented in machine-readable formats.
Someday we won't even need a central BMS server. All management,
control, histories, and analytics will occur in the fog, greatly
reducing bandwidth external to the enterprise. Each controller
will contain its own part of the BMS system, as well as backups of
other parts. Relationships to other equipment on and off-site will be
encoded in the form of tags which will be used for M2M control.
footer
[an error occurred while processing this directive]
[Click Banner To Learn More]
[Home Page] [The
Automator] [About] [Subscribe
] [Contact
Us]